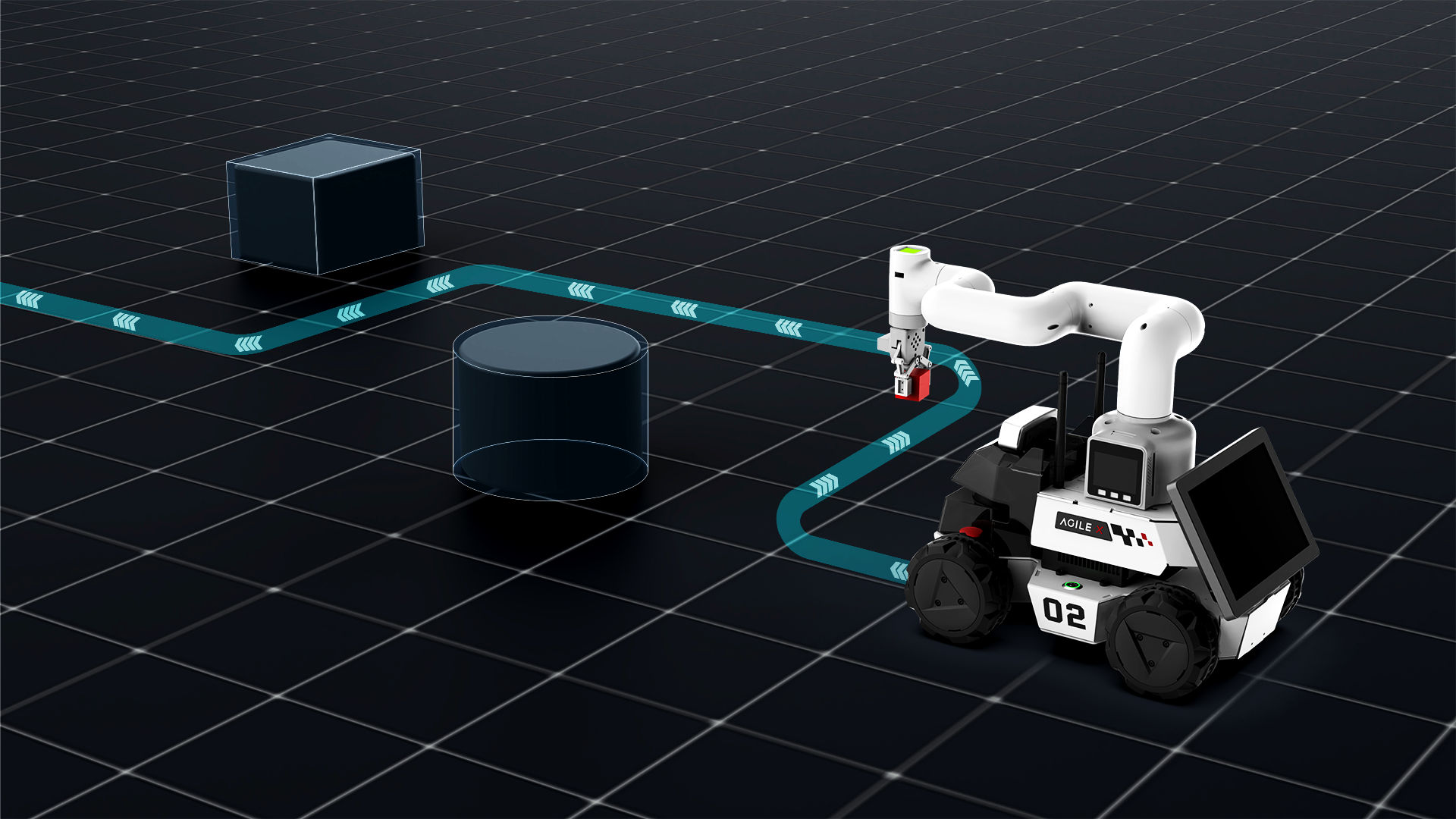
ROS 2 多模態(tài)移動(dòng)抓取機(jī)器人平臺(tái) LIMO Cobot 產(chǎn)品特性 技術(shù)參數(shù) 使用手冊(cè) 前往淘寶 前往京東 產(chǎn)品功能與應(yīng)用 LIMO Cobot是大象機(jī)器人、松靈機(jī)器人聯(lián)合推出的一款桌面級(jí)的移動(dòng)抓取機(jī)器人平臺(tái)基于大象myCobot 280 M5六軸協(xié)作機(jī)械臂、松靈LIMO PRO的最新抓取機(jī)器人產(chǎn)品,它集成了移動(dòng)、協(xié)作和智能三大功能,適用于教學(xué)、競(jìng)賽和培訓(xùn)等領(lǐng)域。 移動(dòng)抓取 LIMO?Cobot配備機(jī)械臂,支持多種末端執(zhí)行器,使其能夠?qū)崿F(xiàn)精準(zhǔn)的移動(dòng)抓取,適應(yīng)不同任務(wù)需求。 自主探圖 LIMO?Cobot能夠自主探測(cè)和構(gòu)建環(huán)境地圖,為機(jī)器人在復(fù)雜環(huán)境中的導(dǎo)航提供準(zhǔn)確的數(shù)據(jù)支持。 智能避障 LIMO?Cobot能夠智能感知周?chē)h(huán)境,并靈活規(guī)避障礙物,確保在執(zhí)行任務(wù)時(shí)的安全性。 開(kāi)源支持 支持ROS和Gazebo,并兼容Python、C++等主流編程語(yǔ)言。這為開(kāi)發(fā)者提供了靈活的開(kāi)發(fā)環(huán)境,降低了開(kāi)發(fā)門(mén)檻。 強(qiáng)大底盤(pán) LIMO Cobot的底盤(pán)配備了EAI mini-T Pro激光雷達(dá)、奧比中光深度相機(jī)、IMU等先進(jìn)傳感器,確保了出色的操控性能。 它采用了四個(gè)輪轂電機(jī)驅(qū)動(dòng),提供了卓越的穩(wěn)定性和機(jī)動(dòng)性,可以在各種地形環(huán)境中自如運(yùn)動(dòng)。 更重要的是,它能夠根據(jù)地形需求切換四種模式:阿克曼、四輪差速、麥克納姆輪和履帶,這是其他移動(dòng)機(jī)器人所不具備的功能。 阿克曼 四輪差速 履帶 麥克納姆輪 復(fù)合應(yīng)用 LIMO Cobot搭載大象機(jī)器人myCobot 280 M5機(jī)械臂組合成復(fù)合機(jī)器人。 myCobot 280M5自重850g,有效載荷250g,有效工作半徑280mm;體積小巧但功能強(qiáng)大,可搭配多種末端執(zhí)行器適配多種應(yīng)用場(chǎng)景,支持多平臺(tái)軟件的二次開(kāi)發(fā),滿足科研教育、智能家居,商業(yè)探索等各種場(chǎng)景需求,搭配不同末端可實(shí)現(xiàn)多種應(yīng)用。 LIMO PRO LIMO Cobot搭載了Nvidia Orin Nano工控機(jī),使LIMO Cobot獲得更強(qiáng)的環(huán)境感知和理解能力,可以實(shí)現(xiàn)自主導(dǎo)航與避障、自主探圖、移動(dòng)抓取、視覺(jué)識(shí)別等功能 。 它提供了開(kāi)放式接口和豐富的ROS教程案例,適合教學(xué)、競(jìng)賽和培訓(xùn)等用途。 移動(dòng)抓取 自主導(dǎo)航 視覺(jué)識(shí)別 自主探圖 ROS2仿真控制支持 LIMO Cobot搭載了ROS 2的開(kāi)源機(jī)器人軟件平臺(tái),它為L(zhǎng)IMO機(jī)器人提供了豐富的開(kāi)發(fā)工具和功能庫(kù),可以幫助用戶快速學(xué)習(xí)和開(kāi)發(fā)機(jī)器人應(yīng)用程序。她可實(shí)現(xiàn)RViz、Nav2、Gazebo等不同開(kāi)發(fā)工具。 配套課程 配套課程包括:ROS操作系統(tǒng)、Python編程、移動(dòng)機(jī)器人、機(jī)械臂控制、傳感器應(yīng)用、路徑規(guī)劃等。學(xué)生可以從基礎(chǔ)到綜合,全面學(xué)習(xí)ROS機(jī)器人。 購(gòu)買(mǎi)渠道 如果您對(duì)該產(chǎn)品感興趣,請(qǐng)?zhí)砑酉路綄?duì)應(yīng)二維碼,我們會(huì)為您提供一對(duì)一客戶支持,如您不方便添加,請(qǐng)聯(lián)系我們的公司郵箱,期待您的咨詢: 售前咨詢小管家 sales@elephantrobotics.com marketing@elephantrobotics.com


抓取20240110.png)

源支持20240110-1024x576.png)




合應(yīng)用myCobot-280-M5_1_20240110-1024x512.png)


合應(yīng)用LIMOPRO_1_20240110-1024x576.jpg)
合應(yīng)用LIMOPRO_2_20240110.gif)
合應(yīng)用LIMOPRO_3_20240110.gif)
合應(yīng)用LIMOPRO_4_20240110.gif)
合應(yīng)用LIMOPRO_5_20240110.gif)


微信截圖_17013249557980.png)